real_robot.cpp File Reference
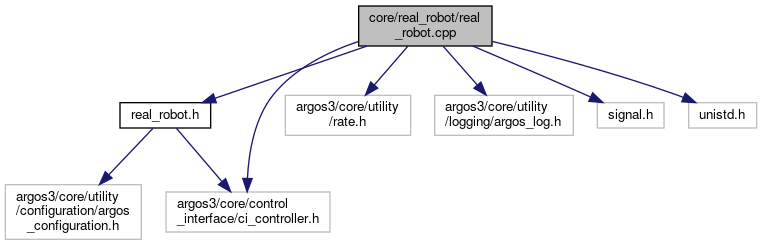
#include "real_robot.h"#include <argos3/core/utility/rate.h>#include <argos3/core/utility/logging/argos_log.h>#include <argos3/core/control_interface/ci_controller.h>#include <signal.h>#include <unistd.h>
Include dependency graph for real_robot.cpp: