miniquadrotor_rotor_default_actuator.cpp File Reference
#include "miniquadrotor_rotor_default_actuator.h"#include <argos3/plugins/simulator/entities/rotor_equipped_entity.h>#include <argos3/core/utility/logging/argos_log.h>#include <argos3/core/utility/plugins/factory.h>
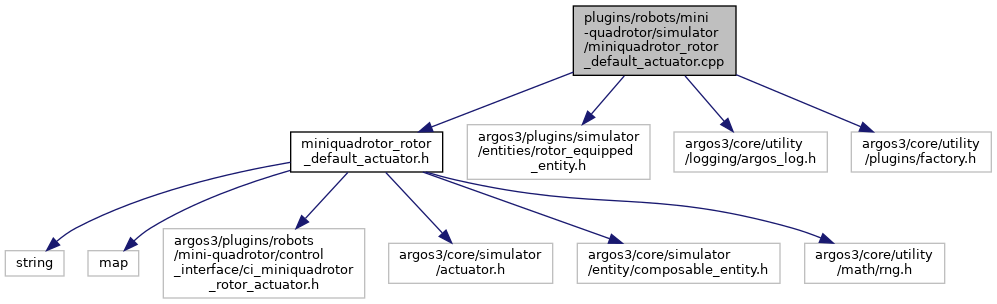
Include dependency graph for miniquadrotor_rotor_default_actuator.cpp:
Go to the source code of this file.
Namespaces | |
| argos | |
| The namespace containing all the ARGoS related code. | |
Functions | |
| REGISTER_ACTUATOR (CMiniQuadrotorRotorDefaultActuator, "miniquadrotor_rotor", "default", "Carlo Pinciroli [ilpincy@gmail.com]", "1.0", "The mini-quadrotor rotor actuator.", "This actuator controls the four rotors of a mini-quadrotor robot. For a\n" "complete description of its usage, refer to the\n" "ci_miniquadrotor_rotor_actuator.h file.\n\n" "REQUIRED XML CONFIGURATION\n\n" " <controllers>\n" " ...\n" " <my_controller ...>\n" " ...\n" " <actuators>\n" " ...\n" " <miniquadrotor_rotor implementation=\"default\" />\n" " ...\n" " </actuators>\n" " ...\n" " </my_controller>\n" " ...\n" " </controllers>\n\n" "OPTIONAL XML CONFIGURATION\n\n" "It is possible to specify noisy speed in order to match the characteristics\n" "of the real robot. This can be done with the attribute: 'noise_std_dev',\n" "which indicates the standard deviation of a gaussian noise applied to the\n" "desired velocity of the rotor:\n\n" " <controllers>\n" " ...\n" " <my_controller ...>\n" " ...\n" " <actuators>\n" " ...\n" " <miniquadrotor_rotor implementation=\"default\"\n" " noise_std_dev=\"1\" />\n" " ...\n" " </actuators>\n" " ...\n" " </my_controller>\n" " ...\n" " </controllers>\n", "Usable") | |
Function Documentation
◆ REGISTER_ACTUATOR()
| REGISTER_ACTUATOR | ( | CMiniQuadrotorRotorDefaultActuator | , |
| "miniquadrotor_rotor" | , | ||
| "default" | , | ||
| "Carlo Pinciroli " | [ilpincy @gmail.com], | ||
| "1.0" | , | ||
| "The mini-quadrotor rotor actuator." | , | ||
| "This actuator controls the four rotors of a mini-quadrotor robot. For a\n" "complete description of its | usage, | ||
| refer to the\n" "ci_miniquadrotor_rotor_actuator.h file.\n\n" "REQUIRED XML CONFIGURATION\n\n" "< controllers >\n" " ...\n" "< my_controller ... >\n" " ...\n" "< actuators >\n" " ...\n" "< miniquadrotor_rotor implementation=\"default\" />\n" " ...\n" " </actuators>\n" " ...\n" " </my_controller>\n" " ...\n" " </controllers>\n\n" "OPTIONAL XML CONFIGURATION\n\n" "It is possible to specify noisy speed in order to match the characteristics\n" "of the real robot. This can be done with the attribute: 'noise_std_dev' | , | ||
| \n" "which indicates the standard deviation of a gaussian noise applied to the\n" "desired velocity of the rotor:\n\n" "< controllers >\n" " ...\n" "< my_controller ... >\n" " ...\n" "< actuators >\n" " ...\n" "< miniquadrotor_rotor implementation=\"default\"\n" " noise_std_dev=\"1\" />\n" " ...\n" " </actuators>\n" " ...\n" " </my_controller>\n" " ...\n" " </controllers>\n" | , | ||
| "Usable" | |||
| ) |