argos::CCI_FootBotProximitySensor Class Reference
#include <ci_footbot_proximity_sensor.h>
Inheritance diagram for argos::CCI_FootBotProximitySensor:
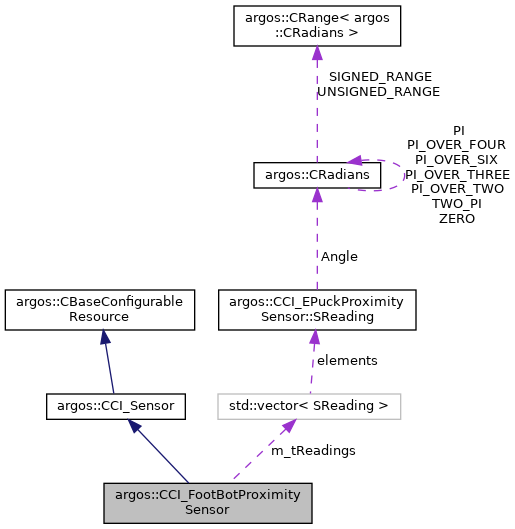
Collaboration diagram for argos::CCI_FootBotProximitySensor:
Classes | |
| struct | SReading |
Public Types | |
| typedef std::vector< SReading > | TReadings |
 Public Types inherited from argos::CCI_Sensor Public Types inherited from argos::CCI_Sensor | |
| typedef std::map< std::string, CCI_Sensor *, std::less< std::string > > | TMap |
Public Member Functions | |
| CCI_FootBotProximitySensor () | |
| Class constructor. More... | |
| virtual | ~CCI_FootBotProximitySensor () |
| Class destructor. More... | |
| const TReadings & | GetReadings () const |
| Returns the readings of this sensor. More... | |
| Public Member Functions inherited from argos::CCI_Sensor | |
| virtual | ~CCI_Sensor () |
| Class destructor. More... | |
| virtual void | Init (TConfigurationNode &t_node) |
| Initializes the sensor from the XML configuration tree. More... | |
| virtual void | Reset () |
| Resets the sensor to the state it had just after Init(). More... | |
| virtual void | Destroy () |
| Destroys the sensor. More... | |
| virtual void | Enable () |
| Enables updating of sensor information in the event loop. More... | |
| virtual void | Disable () |
| Disables updating of sensor information in the event loop. More... | |
| bool | IsEnabled () const |
| bool | IsDisabled () const |
| Public Member Functions inherited from argos::CBaseConfigurableResource | |
| virtual | ~CBaseConfigurableResource () |
| Class destructor. More... | |
Protected Attributes | |
| TReadings | m_tReadings |
Detailed Description
Definition at line 44 of file ci_footbot_proximity_sensor.h.
Member Typedef Documentation
◆ TReadings
| typedef std::vector<SReading> argos::CCI_FootBotProximitySensor::TReadings |
Definition at line 61 of file ci_footbot_proximity_sensor.h.
Constructor & Destructor Documentation
◆ CCI_FootBotProximitySensor()
| argos::CCI_FootBotProximitySensor::CCI_FootBotProximitySensor | ( | ) |
Class constructor.
Definition at line 25 of file ci_footbot_proximity_sensor.cpp.
◆ ~CCI_FootBotProximitySensor()
|
inlinevirtual |
Class destructor.
Definition at line 73 of file ci_footbot_proximity_sensor.h.
Member Function Documentation
◆ GetReadings()
| const CCI_FootBotProximitySensor::TReadings & argos::CCI_FootBotProximitySensor::GetReadings | ( | ) | const |
Returns the readings of this sensor.
Definition at line 36 of file ci_footbot_proximity_sensor.cpp.
Member Data Documentation
◆ m_tReadings
|
protected |
Definition at line 88 of file ci_footbot_proximity_sensor.h.