#include <dynamics3d_multi_body_object_model.h>
|
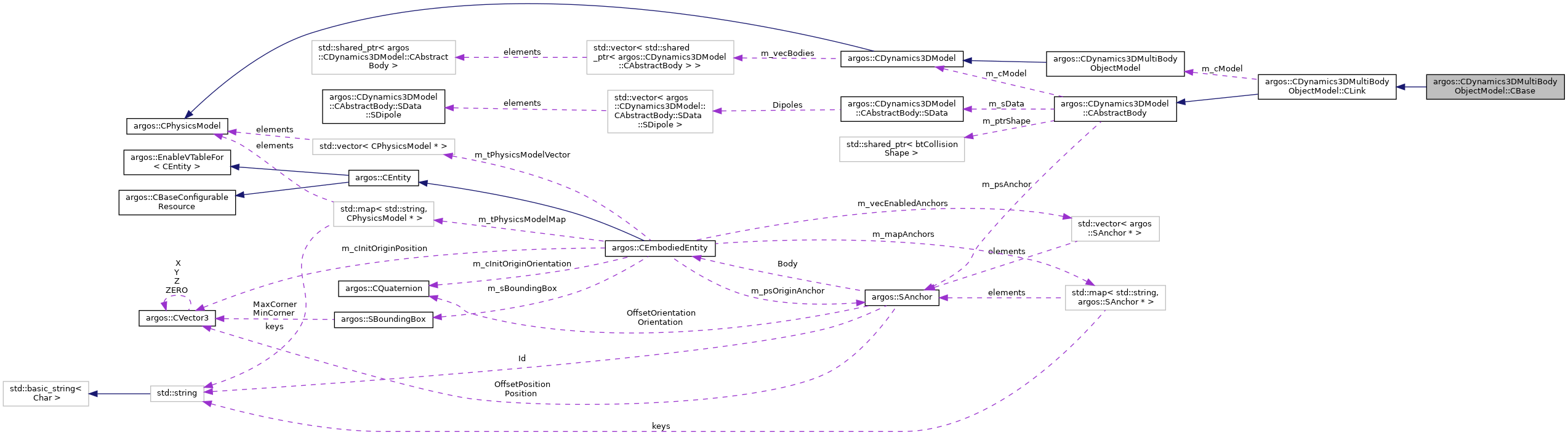
| | CBase (CDynamics3DMultiBodyObjectModel &c_model, SAnchor *ps_anchor, const std::shared_ptr< btCollisionShape > &ptr_shape, const SData &s_data) |
| |
| virtual | ~CBase () |
| |
| virtual void | Reset () |
| |
| virtual void | ApplyForce (const btVector3 &c_force) |
| |
| virtual void | ApplyForce (const btVector3 &c_force, const btVector3 &c_offset) |
| |
| virtual void | ApplyTorque (const btVector3 &c_torque) |
| |
| | CLink (CDynamics3DMultiBodyObjectModel &c_model, UInt32 un_link_index, SAnchor *ps_anchor, const std::shared_ptr< btCollisionShape > &ptr_shape, const SData &s_data) |
| |
| virtual | ~CLink () |
| |
| virtual void | AddToWorld (btMultiBodyDynamicsWorld &c_world) |
| |
| virtual void | RemoveFromWorld (btMultiBodyDynamicsWorld &c_world) |
| |
| virtual btTransform & | GetTransform () |
| |
| UInt32 | GetIndex () const |
| |
| | CAbstractBody (CDynamics3DModel &c_model, SAnchor *ps_anchor, const std::shared_ptr< btCollisionShape > &ptr_shape, const SData &s_data) |
| |
| virtual | ~CAbstractBody () |
| |
| CDynamics3DModel & | GetModel () |
| |
| SAnchor & | GetAnchor () |
| |
| btCollisionShape & | GetShape () |
| |
| const SData & | GetData () const |
| |
| void | UpdateAnchor () |
| |
◆ CBase()
◆ ~CBase()
| virtual argos::CDynamics3DMultiBodyObjectModel::CBase::~CBase |
( |
| ) |
|
|
inlinevirtual |
◆ ApplyForce() [1/2]
| void argos::CDynamics3DMultiBodyObjectModel::CBase::ApplyForce |
( |
const btVector3 & |
c_force | ) |
|
|
virtual |
◆ ApplyForce() [2/2]
| void argos::CDynamics3DMultiBodyObjectModel::CBase::ApplyForce |
( |
const btVector3 & |
c_force, |
|
|
const btVector3 & |
c_offset |
|
) |
| |
|
virtual |
◆ ApplyTorque()
| void argos::CDynamics3DMultiBodyObjectModel::CBase::ApplyTorque |
( |
const btVector3 & |
c_torque | ) |
|
|
virtual |
◆ Reset()
| void argos::CDynamics3DMultiBodyObjectModel::CBase::Reset |
( |
| ) |
|
|
virtual |
 Public Member Functions inherited from argos::CDynamics3DMultiBodyObjectModel::CLink
Public Member Functions inherited from argos::CDynamics3DMultiBodyObjectModel::CLink