The basic interface for all sensors. More...
#include <ci_sensor.h>
Public Types | |
| typedef std::map< std::string, CCI_Sensor *, std::less< std::string > > | TMap |
Public Member Functions | |
| virtual | ~CCI_Sensor () |
| Class destructor. More... | |
| virtual void | Init (TConfigurationNode &t_node) |
| Initializes the sensor from the XML configuration tree. More... | |
| virtual void | Reset () |
| Resets the sensor to the state it had just after Init(). More... | |
| virtual void | Destroy () |
| Destroys the sensor. More... | |
 Public Member Functions inherited from argos::CBaseConfigurableResource Public Member Functions inherited from argos::CBaseConfigurableResource | |
| virtual | ~CBaseConfigurableResource () |
| Class destructor. More... | |
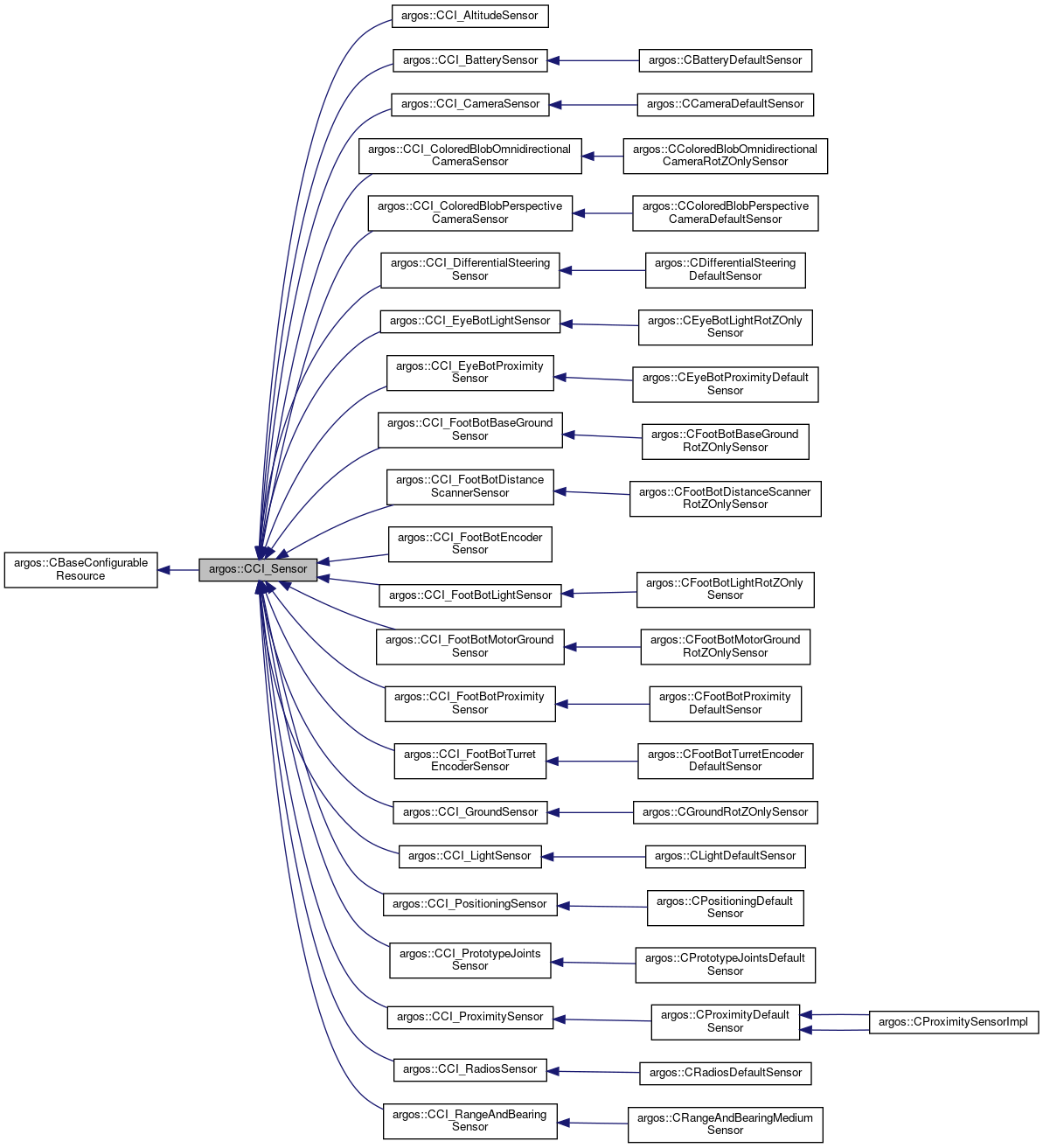
Detailed Description
The basic interface for all sensors.
Definition at line 34 of file ci_sensor.h.
Member Typedef Documentation
◆ TMap
| typedef std::map<std::string, CCI_Sensor*, std::less<std::string> > argos::CCI_Sensor::TMap |
Definition at line 38 of file ci_sensor.h.
Constructor & Destructor Documentation
◆ ~CCI_Sensor()
|
inlinevirtual |
Class destructor.
Definition at line 45 of file ci_sensor.h.
Member Function Documentation
◆ Destroy()
|
inlinevirtual |
Destroys the sensor.
This method is supposed to undo whatever was done in Init(). The default implementation of this method does nothing.
Implements argos::CBaseConfigurableResource.
Reimplemented in argos::CRangeAndBearingMediumSensor, argos::CColoredBlobOmnidirectionalCameraRotZOnlySensor, and argos::CColoredBlobPerspectiveCameraDefaultSensor.
Definition at line 71 of file ci_sensor.h.
◆ Init()
|
inlinevirtual |
Initializes the sensor from the XML configuration tree.
The default implementation of this method does nothing.
- Parameters
-
t_node The XML configuration tree relative to this sensor.
Implements argos::CBaseConfigurableResource.
Reimplemented in argos::CCameraDefaultSensor, argos::CPrototypeJointsDefaultSensor, argos::CFootBotDistanceScannerRotZOnlySensor, argos::CFootBotBaseGroundRotZOnlySensor, argos::CFootBotMotorGroundRotZOnlySensor, argos::CBatteryDefaultSensor, argos::CGroundRotZOnlySensor, argos::CEyeBotLightRotZOnlySensor, argos::CFootBotLightRotZOnlySensor, argos::CDifferentialSteeringDefaultSensor, argos::CLightDefaultSensor, argos::CPositioningDefaultSensor, argos::CProximityDefaultSensor, argos::CRangeAndBearingMediumSensor, argos::CEyeBotProximityDefaultSensor, argos::CFootBotProximityDefaultSensor, argos::CRadiosDefaultSensor, argos::CColoredBlobOmnidirectionalCameraRotZOnlySensor, and argos::CColoredBlobPerspectiveCameraDefaultSensor.
Definition at line 54 of file ci_sensor.h.
◆ Reset()
|
inlinevirtual |
Resets the sensor to the state it had just after Init().
The default implementation of this method does nothing.
Implements argos::CBaseConfigurableResource.
Reimplemented in argos::CPrototypeJointsDefaultSensor, argos::CFootBotDistanceScannerRotZOnlySensor, argos::CFootBotBaseGroundRotZOnlySensor, argos::CFootBotMotorGroundRotZOnlySensor, argos::CBatteryDefaultSensor, argos::CGroundRotZOnlySensor, argos::CEyeBotLightRotZOnlySensor, argos::CFootBotLightRotZOnlySensor, argos::CDifferentialSteeringDefaultSensor, argos::CLightDefaultSensor, argos::CPositioningDefaultSensor, argos::CProximityDefaultSensor, argos::CEyeBotProximityDefaultSensor, argos::CFootBotProximityDefaultSensor, argos::CFootBotTurretEncoderDefaultSensor, argos::CRangeAndBearingMediumSensor, argos::CRadiosDefaultSensor, argos::CColoredBlobOmnidirectionalCameraRotZOnlySensor, and argos::CColoredBlobPerspectiveCameraDefaultSensor.
Definition at line 62 of file ci_sensor.h.