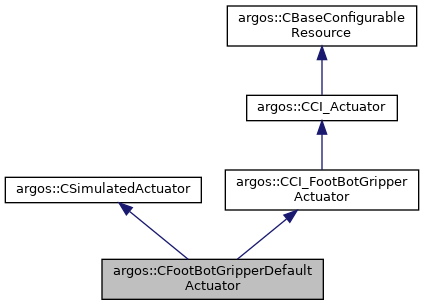
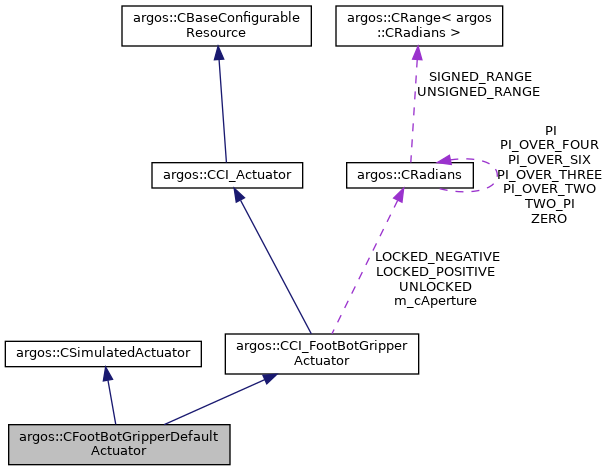
#include <footbot_gripper_default_actuator.h>
Public Member Functions | |
| CFootBotGripperDefaultActuator () | |
| virtual | ~CFootBotGripperDefaultActuator () |
| virtual void | SetRobot (CComposableEntity &c_entity) |
| Sets the entity associated to this actuator. More... | |
| virtual void | Update () |
| Updates the state of the entity associated to this actuator. More... | |
| virtual void | Reset () |
| Resets the actuator to the state it had just after Init(). More... | |
| virtual void | EnableCheckForObjectGrippedRoutine () |
| Enables the ASEBA routine that checks for a gripped object each time the gripper is opened. More... | |
| virtual void | DisableCheckForObjectGrippedRoutine () |
| Disables the ASEBA routine that checks for a gripped object each time the gripper is opened. More... | |
 Public Member Functions inherited from argos::CSimulatedActuator Public Member Functions inherited from argos::CSimulatedActuator | |
| virtual | ~CSimulatedActuator () |
| Class destructor. More... | |
| Public Member Functions inherited from argos::CCI_FootBotGripperActuator | |
| CCI_FootBotGripperActuator () | |
| Class constructor. More... | |
| virtual | ~CCI_FootBotGripperActuator () |
| Class destructor. More... | |
| void | SetAperture (const CRadians &c_aperture) |
| Sets the gripper aperture. More... | |
| void | LockPositive () |
| Sets gripper aperture to lock, positive direction. More... | |
| void | LockNegative () |
| Sets gripper aperture to lock, negative direction. More... | |
| void | Unlock () |
| Unlock gripper: objects are released. More... | |
| Public Member Functions inherited from argos::CCI_Actuator | |
| virtual | ~CCI_Actuator () |
| Class destructor. More... | |
| virtual void | Init (TConfigurationNode &t_node) |
| Initializes the actuator from the XML configuration tree. More... | |
| virtual void | Destroy () |
| Destroys the actuator. More... | |
| Public Member Functions inherited from argos::CBaseConfigurableResource | |
| virtual | ~CBaseConfigurableResource () |
| Class destructor. More... | |
Additional Inherited Members | |
| Public Types inherited from argos::CCI_Actuator | |
| typedef std::map< std::string, CCI_Actuator *, std::less< std::string > > | TMap |
| Static Public Attributes inherited from argos::CCI_FootBotGripperActuator | |
| static CRadians | UNLOCKED |
| static CRadians | LOCKED_POSITIVE |
| static CRadians | LOCKED_NEGATIVE |
| Protected Attributes inherited from argos::CCI_FootBotGripperActuator | |
| CRadians | m_cAperture |
Detailed Description
Definition at line 23 of file footbot_gripper_default_actuator.h.
Constructor & Destructor Documentation
◆ CFootBotGripperDefaultActuator()
| argos::CFootBotGripperDefaultActuator::CFootBotGripperDefaultActuator | ( | ) |
Definition at line 16 of file footbot_gripper_default_actuator.cpp.
◆ ~CFootBotGripperDefaultActuator()
|
inlinevirtual |
Definition at line 30 of file footbot_gripper_default_actuator.h.
Member Function Documentation
◆ DisableCheckForObjectGrippedRoutine()
|
inlinevirtual |
Disables the ASEBA routine that checks for a gripped object each time the gripper is opened.
Implements argos::CCI_FootBotGripperActuator.
Definition at line 38 of file footbot_gripper_default_actuator.h.
◆ EnableCheckForObjectGrippedRoutine()
|
inlinevirtual |
Enables the ASEBA routine that checks for a gripped object each time the gripper is opened.
Implements argos::CCI_FootBotGripperActuator.
Definition at line 37 of file footbot_gripper_default_actuator.h.
◆ Reset()
|
virtual |
Resets the actuator to the state it had just after Init().
The default implementation of this method does nothing.
Reimplemented from argos::CCI_Actuator.
Definition at line 37 of file footbot_gripper_default_actuator.cpp.
◆ SetRobot()
|
virtual |
Sets the entity associated to this actuator.
When a controller is created, all the sensors and actuators are created, too. This function is called right before the Init() method of the actuator is called.
- Parameters
-
c_entity The entity to associate to this actuator.
Implements argos::CSimulatedActuator.
Definition at line 22 of file footbot_gripper_default_actuator.cpp.
◆ Update()
|
virtual |
Updates the state of the entity associated to this actuator.
Implements argos::CSimulatedActuator.
Definition at line 30 of file footbot_gripper_default_actuator.cpp.