#include <footbot_turret_default_actuator.h>
Public Member Functions | |
| CFootBotTurretDefaultActuator () | |
| virtual | ~CFootBotTurretDefaultActuator () |
| virtual void | SetRobot (CComposableEntity &c_entity) |
| Sets the entity associated to this actuator. More... | |
| virtual void | SetRotation (const CRadians &c_angle) |
| Sets the turret rotation Turret rotation is expressed in radians, positive values rotate the turret clockwise when looking from above. More... | |
| virtual void | SetRotationSpeed (SInt32 n_speed_pulses) |
| Sets the turret rotation speed Turret rotation speed is expressed in motor pulses, positive values rotate the turret clockwise when looking from above. More... | |
| virtual void | SetMode (ETurretModes e_mode) |
| Sets the turret control mode Modes are: angular position control, rotation speed control, passive mode, off. More... | |
| virtual void | Update () |
| Updates the state of the entity associated to this actuator. More... | |
| virtual void | Reset () |
| Resets the actuator to the state it had just after Init(). More... | |
 Public Member Functions inherited from argos::CSimulatedActuator Public Member Functions inherited from argos::CSimulatedActuator | |
| virtual | ~CSimulatedActuator () |
| Class destructor. More... | |
| Public Member Functions inherited from argos::CCI_FootBotTurretActuator | |
| virtual | ~CCI_FootBotTurretActuator () |
| Destructor. More... | |
| void | SetActiveWithRotation (const CRadians &c_angle) |
| Sets the turret control mode to active, and sets the target rotation to the given one. More... | |
| void | SetSpeedControlMode () |
| Sets the turret control mode to speed control. More... | |
| void | SetPositionControlMode () |
| Sets the turret control mode to position control. More... | |
| void | SetPassiveMode () |
| Sets the turret control mode to passive. More... | |
| Public Member Functions inherited from argos::CCI_Actuator | |
| virtual | ~CCI_Actuator () |
| Class destructor. More... | |
| virtual void | Init (TConfigurationNode &t_node) |
| Initializes the actuator from the XML configuration tree. More... | |
| virtual void | Destroy () |
| Destroys the actuator. More... | |
| Public Member Functions inherited from argos::CBaseConfigurableResource | |
| virtual | ~CBaseConfigurableResource () |
| Class destructor. More... | |
Additional Inherited Members | |
| Public Types inherited from argos::CCI_FootBotTurretActuator | |
| enum | ETurretModes { MODE_OFF , MODE_PASSIVE , MODE_SPEED_CONTROL , MODE_POSITION_CONTROL } |
| Turret modes. More... | |
| Public Types inherited from argos::CCI_Actuator | |
| typedef std::map< std::string, CCI_Actuator *, std::less< std::string > > | TMap |
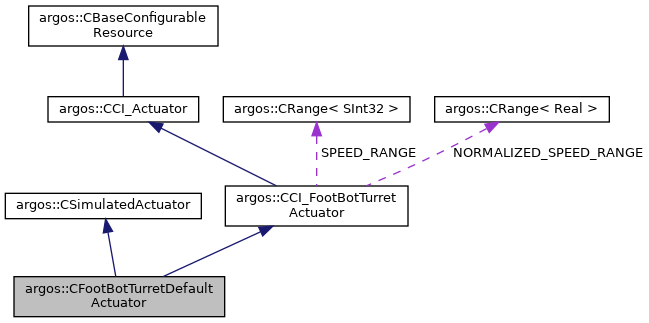
| Static Public Attributes inherited from argos::CCI_FootBotTurretActuator | |
| static const CRange< SInt32 > | SPEED_RANGE |
| static const CRange< Real > | NORMALIZED_SPEED_RANGE |
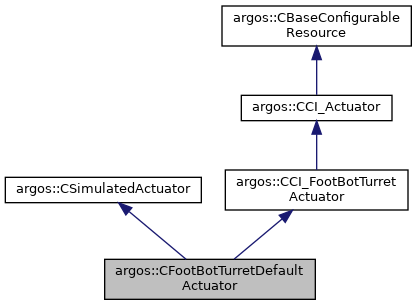
Detailed Description
Definition at line 24 of file footbot_turret_default_actuator.h.
Constructor & Destructor Documentation
◆ CFootBotTurretDefaultActuator()
| argos::CFootBotTurretDefaultActuator::CFootBotTurretDefaultActuator | ( | ) |
Definition at line 16 of file footbot_turret_default_actuator.cpp.
◆ ~CFootBotTurretDefaultActuator()
|
inlinevirtual |
Definition at line 30 of file footbot_turret_default_actuator.h.
Member Function Documentation
◆ Reset()
|
virtual |
Resets the actuator to the state it had just after Init().
The default implementation of this method does nothing.
Reimplemented from argos::CCI_Actuator.
Definition at line 59 of file footbot_turret_default_actuator.cpp.
◆ SetMode()
|
virtual |
Sets the turret control mode Modes are: angular position control, rotation speed control, passive mode, off.
- Parameters
-
un_mode turret control mode, possible values are defined in CCI_FootBotTurretActuator
Implements argos::CCI_FootBotTurretActuator.
Definition at line 45 of file footbot_turret_default_actuator.cpp.
◆ SetRobot()
|
virtual |
Sets the entity associated to this actuator.
When a controller is created, all the sensors and actuators are created, too. This function is called right before the Init() method of the actuator is called.
- Parameters
-
c_entity The entity to associate to this actuator.
Implements argos::CSimulatedActuator.
Definition at line 23 of file footbot_turret_default_actuator.cpp.
◆ SetRotation()
|
virtual |
Sets the turret rotation Turret rotation is expressed in radians, positive values rotate the turret clockwise when looking from above.
In the current real robot implementation, values are limited using range functions. If the turret is not in position control mode, the only effect is that the target rotation is changed but the turret will not turn: it will turn when position control mode is activated (unless another target rotation is specified meantime).
- Parameters
-
c_angle desired turret rotation
Implements argos::CCI_FootBotTurretActuator.
Definition at line 31 of file footbot_turret_default_actuator.cpp.
◆ SetRotationSpeed()
|
virtual |
Sets the turret rotation speed Turret rotation speed is expressed in motor pulses, positive values rotate the turret clockwise when looking from above.
In the current real robot implementation, values are limited using range functions. If the turret is not in speed control mode, the only effect is that the target rotation speed is changed but the turret will not turn: it will turn when speed control mode is activated (unless another target rotation speed is specified meantime).
- Parameters
-
n_speed_pulses desired turret rotation speed - pid pulses
Implements argos::CCI_FootBotTurretActuator.
Definition at line 38 of file footbot_turret_default_actuator.cpp.
◆ Update()
|
virtual |
Updates the state of the entity associated to this actuator.
Implements argos::CSimulatedActuator.
Definition at line 52 of file footbot_turret_default_actuator.cpp.