This class provides the most general interface to a camera. More...
#include <ci_colored_blob_omnidirectional_camera_sensor.h>
Classes | |
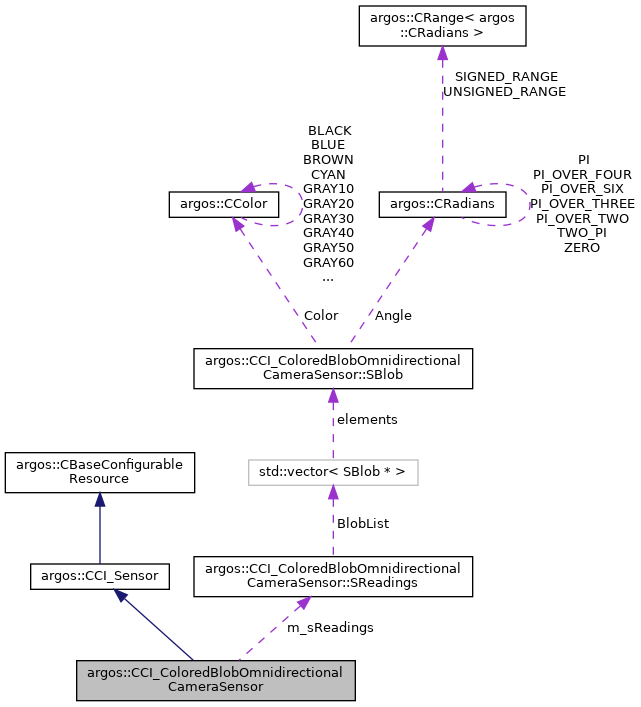
| struct | SBlob |
| An SBlob represents a generic colored 2D segment in the image. More... | |
| struct | SReadings |
| It represents the readings collected through the camera at a specific time step. More... | |
Public Types | |
| typedef std::vector< SBlob * > | TBlobList |
| Vector of pointers to colored blobs. More... | |
 Public Types inherited from argos::CCI_Sensor Public Types inherited from argos::CCI_Sensor | |
| typedef std::map< std::string, CCI_Sensor *, std::less< std::string > > | TMap |
Public Member Functions | |
| CCI_ColoredBlobOmnidirectionalCameraSensor () | |
| Constructor. More... | |
| virtual | ~CCI_ColoredBlobOmnidirectionalCameraSensor () |
| Destructor. More... | |
| const SReadings & | GetReadings () const |
| Returns a reference to the current camera readings. More... | |
| Public Member Functions inherited from argos::CCI_Sensor | |
| virtual | ~CCI_Sensor () |
| Class destructor. More... | |
| virtual void | Init (TConfigurationNode &t_node) |
| Initializes the sensor from the XML configuration tree. More... | |
| virtual void | Reset () |
| Resets the sensor to the state it had just after Init(). More... | |
| virtual void | Destroy () |
| Destroys the sensor. More... | |
| virtual void | Enable () |
| Enables updating of sensor information in the event loop. More... | |
| virtual void | Disable () |
| Disables updating of sensor information in the event loop. More... | |
| bool | IsEnabled () const |
| bool | IsDisabled () const |
| Public Member Functions inherited from argos::CBaseConfigurableResource | |
| virtual | ~CBaseConfigurableResource () |
| Class destructor. More... | |
Protected Attributes | |
| SReadings | m_sReadings |
Detailed Description
This class provides the most general interface to a camera.
The camera sensor enables the user to extract information from the images acquired by the simulated or by the physical camera. This interface defines also the basic type of information that at the moment it is possible to extract from image processing on the real robot, that is the position of the colored LED of neighboring robots. The camera can be enabled and disabled, in order to save computation time.
Definition at line 26 of file ci_colored_blob_omnidirectional_camera_sensor.h.
Member Typedef Documentation
◆ TBlobList
| typedef std::vector<SBlob*> argos::CCI_ColoredBlobOmnidirectionalCameraSensor::TBlobList |
Vector of pointers to colored blobs.
Definition at line 78 of file ci_colored_blob_omnidirectional_camera_sensor.h.
Constructor & Destructor Documentation
◆ CCI_ColoredBlobOmnidirectionalCameraSensor()
|
inline |
Constructor.
Definition at line 107 of file ci_colored_blob_omnidirectional_camera_sensor.h.
◆ ~CCI_ColoredBlobOmnidirectionalCameraSensor()
|
inlinevirtual |
Destructor.
Definition at line 112 of file ci_colored_blob_omnidirectional_camera_sensor.h.
Member Function Documentation
◆ GetReadings()
| const CCI_ColoredBlobOmnidirectionalCameraSensor::SReadings & argos::CCI_ColoredBlobOmnidirectionalCameraSensor::GetReadings | ( | ) | const |
Returns a reference to the current camera readings.
- Returns
- A reference to the current camera readings.
Definition at line 85 of file ci_colored_blob_omnidirectional_camera_sensor.cpp.
Member Data Documentation
◆ m_sReadings
|
protected |
Definition at line 128 of file ci_colored_blob_omnidirectional_camera_sensor.h.